Research
H-index: 4 | i10-index: 1
FRIEREN: Face Resizing Image Quality Evaluation via Robust Estimation of Image Naturalness
APCCAS, 2025
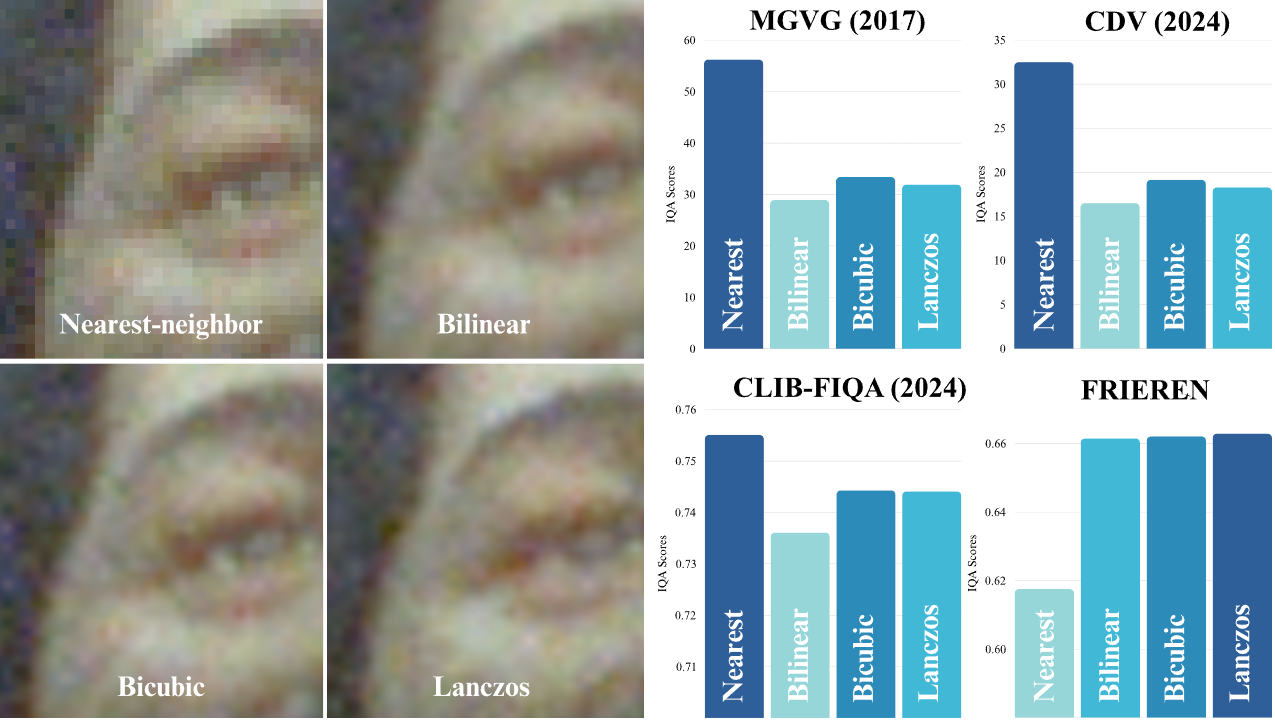
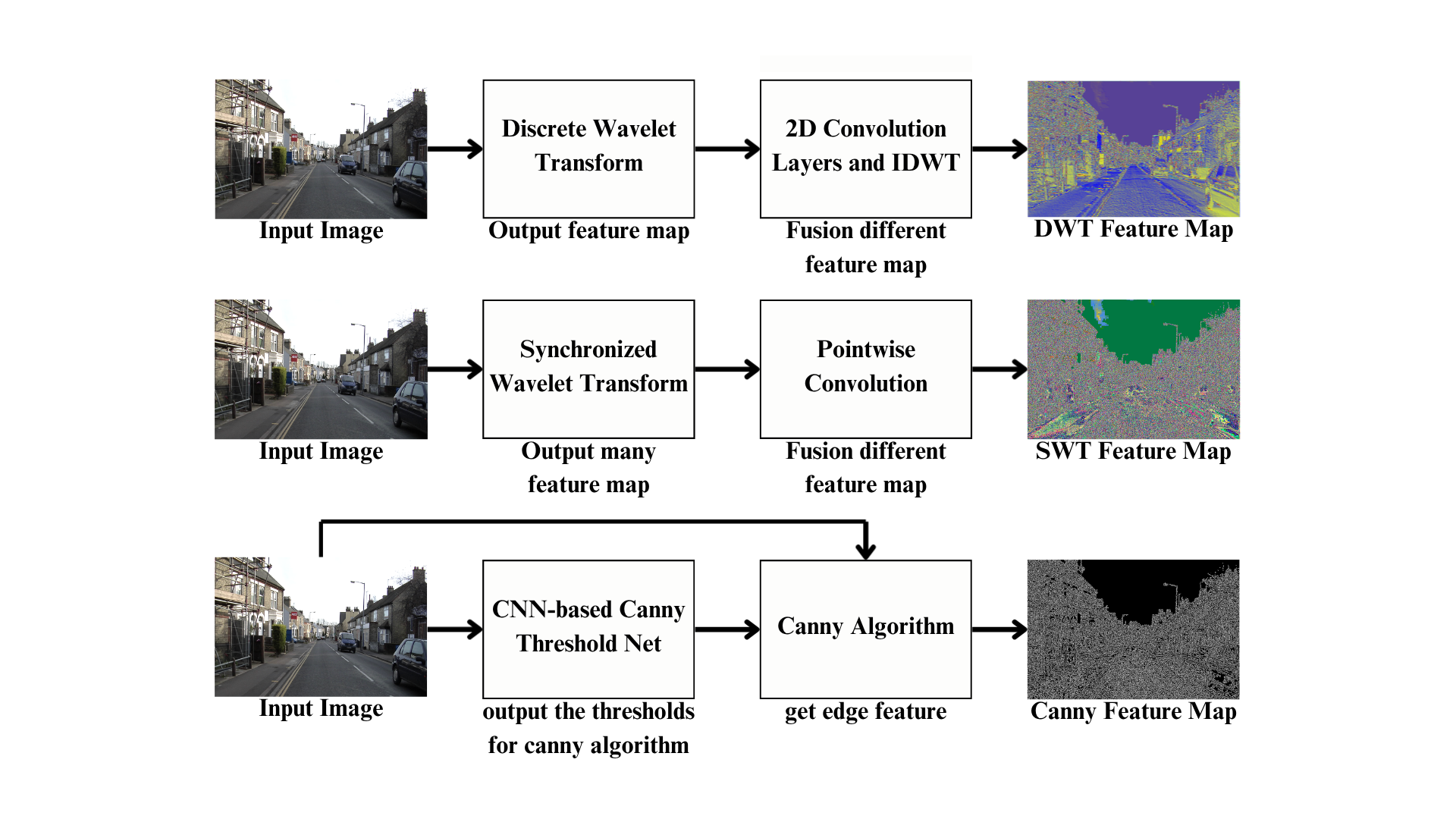
In practice, enlarging faces via nearest, bilinear, bicubic, or Lanczos interpolation introduces high-frequency artifacts that many NR-IQA methods misread as sharpness.
FRIEREN estimates motion noise from a single frame, DWT-based spatial noise, and an HVS-aligned sharpness measure, then regresses quality via KANs;
it better matches human preference (Lanczos > Bicubic > Bilinear > Nearest) and outperforms SOTA on MS1MV2 (PLCC 0.8954 / SROCC 0.8723).
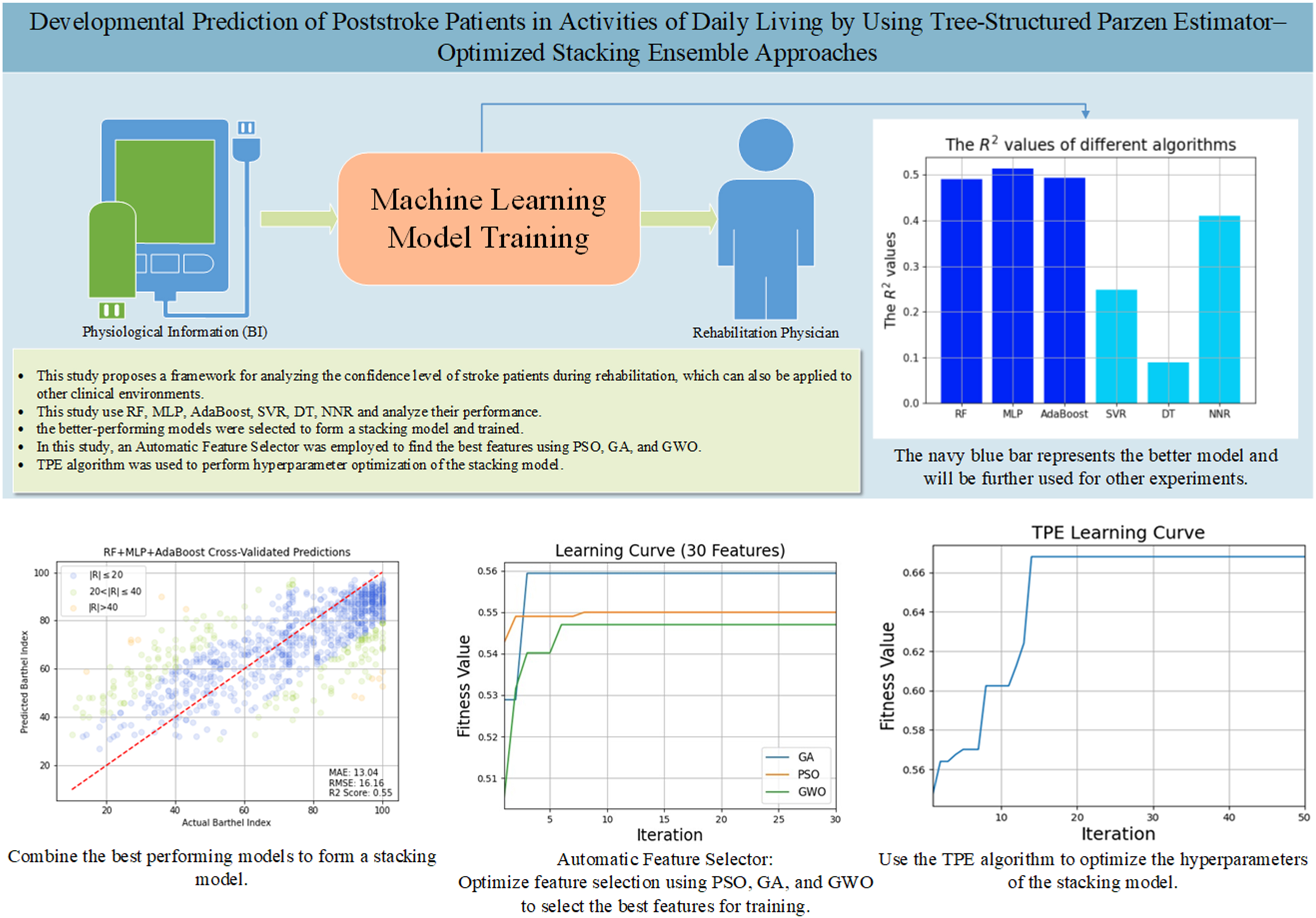
Developmental Prediction of Poststroke Patients in Activities of Daily Living by Using Tree-Structured Parzen Estimator–Optimized Stacking Ensemble Approaches
Pei-Hua Lin,
Ping-Huan Kuo,
Kuan-Lin ChenIEEE Journal of Biomedical and Health Informatics (JBHI), 2024
We predict discharge Barthel Index for stroke inpatients using a TPE-optimized stacking ensemble (RF+AdaBoost+MLP), achieving R²=0.5453, MAE=12.797,
and RMSE=16.182 on 878 cases, with admission BI identified as the most critical feature.
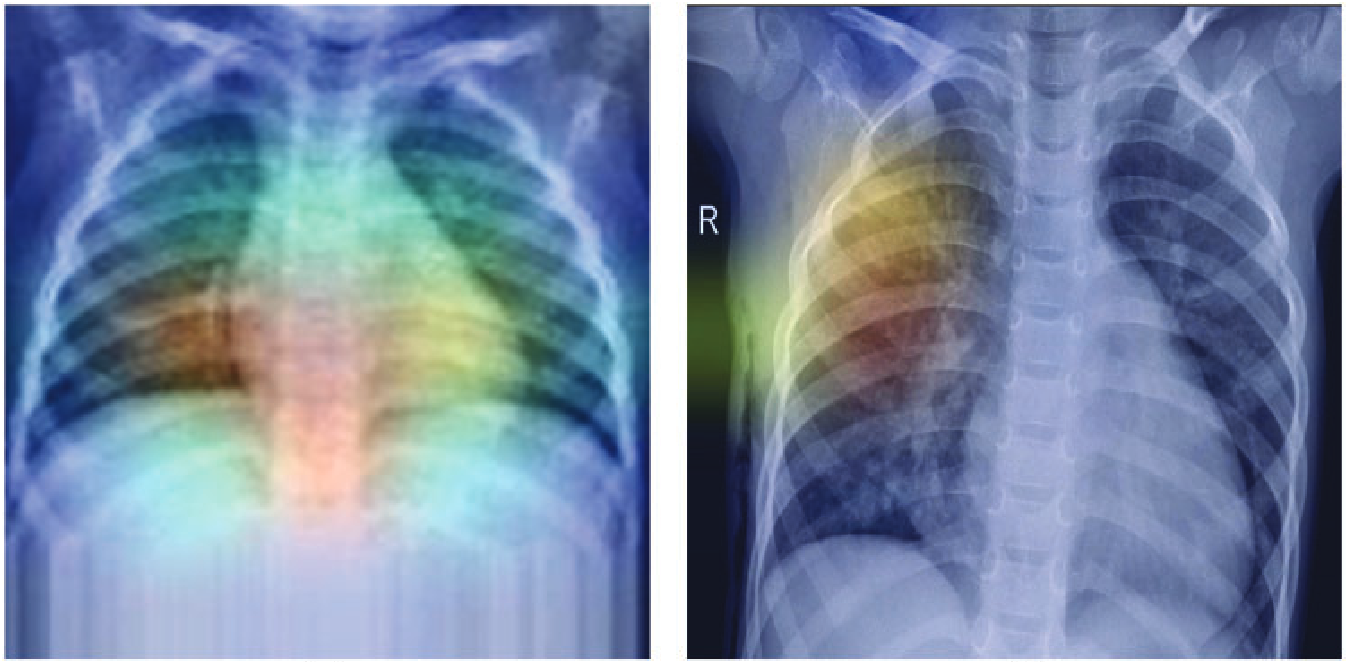
Optical Based Gradient-Weighted Class Activation Mapping and Transfer Learning Integrated Pneumonia Prediction Model
Chia-Wei Jan, Yu-Jhih Chiu,
Kuan-Lin Chen, Ting-Chun Yao,
Ping-Huan KuoComputer Systems Science and Engineering (CSSE), 2024
We introduce GCPNet, a chest X-ray pneumonia aid that fuses transfer learning with Grad-CAM–guided re-training—up-weighting samples whose attention drifts off-center—and,
with augmentation, reaches 97.2% accuracy with interpretable heatmaps.